
 Our favorite - SquareBot!
Our favorite - SquareBot!
Contributed by Ken Mitchell (vexbots at mitchell dot dhs dot org).
The 3 sub-assemblies must be kept with the main ldr file to use this model.
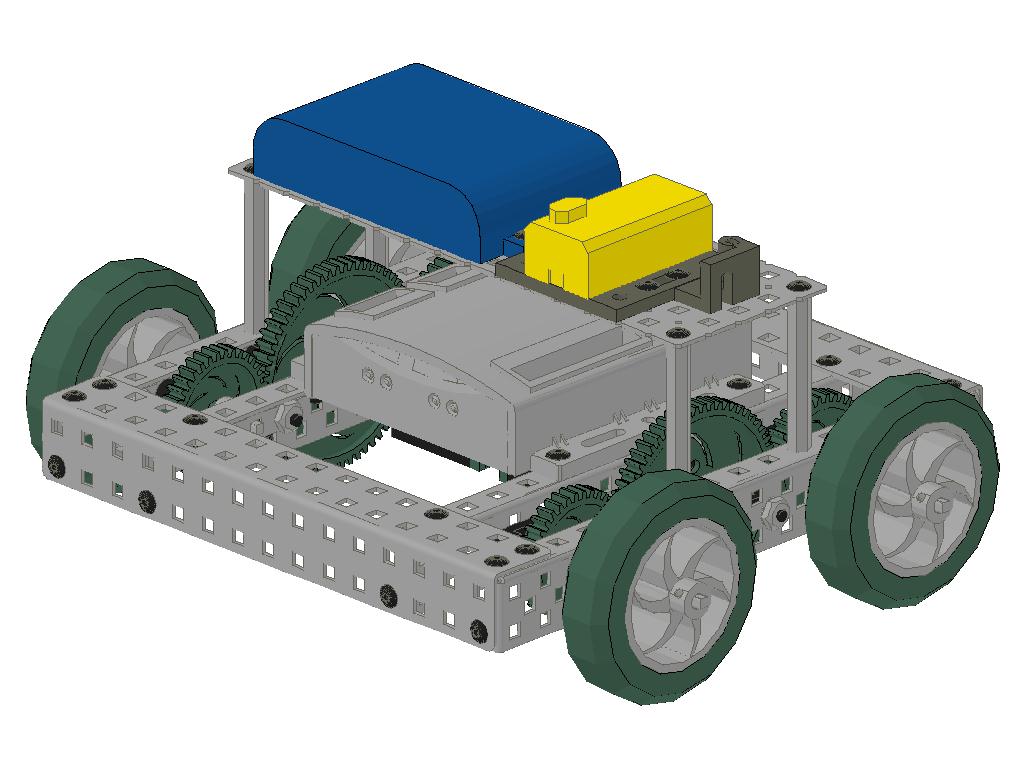
 DragRacer - Starter Kit only (some cut parts.) A simple model of a drag racer.
DragRacer - Starter Kit only (some cut parts.) A simple model of a drag racer.
Here is the 2.0 version of the DragRacer model (the .ldr file.)
You may need to gear it differently, I was trying to have 2 motors drive one axle. (Note that the model has more axles in the back because I don't have the larger axle parts modeled yet. The back axles should just be a single axle in this model. Also note that some of the 8-32 screws are actually 6-32 because I haven't got the 6-32 parts modeled yet. Most of the missing parts should be coming soon.)
Driving the 2 motors independently is a trivial change to this model and would allow the transmitter driving mode to drive the drag racer.
The cut parts can be substituted without cutting. The lock bar can substitute for a 1x3 bar and a combination of lock bars can be made into an ugly 1x4 bar. The long axle would need to be cut unless you are ok with it sticking out.
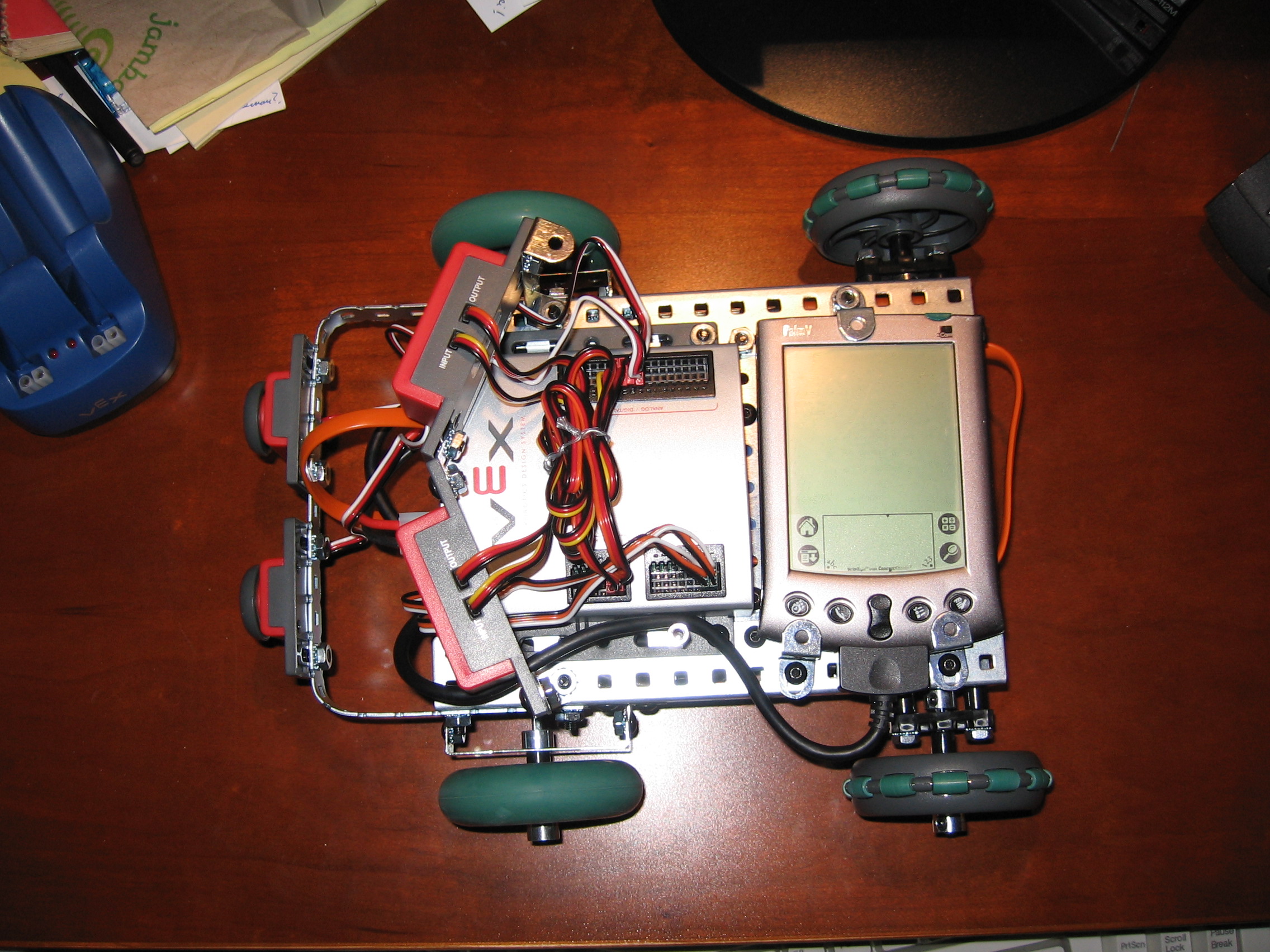
 PDABot is specifically designed to hold a
Palm® Handheld onto your VEX™ Robotics Kit robot. This model uses the version 2.0 parts.
PDABot is specifically designed to hold a
Palm® Handheld onto your VEX™ Robotics Kit robot. This model uses the version 2.0 parts.
The Palm® Handheld fits under the 3 S brackets by sliding the top under the single bracket and the bottom under the pair of brackets on the other side. Once you plug the sync cable between the pair of brackets, it cannot slide out again. Here's a picture of it. (I rebuilt the wheels to simplify the design from what's shown here.)
All the cables, the NiCd battery, and the programming kit fit inside the cavity of the robot. A 1x25 bar can be attached at the front wheels by bending in two places to allow for bump switches or other devices to be where they're needed. It is very easy to incorporate optical encoders on the front wheels.
Intelitek reserves all rights to easyC software. easyC is a trademark of Intelitek, Inc.
All other trademarks and servicemarks are property of their respective owners.
{kind=link}